A merevlemez
Története
1956-ban az IBM elkészítette az első véletlen hozzáférésű háttértárolót, az IBM 305 RAMAC-ot (Random Access Method of Accounting and Control), mely a mai merevlemezeink ősatyja. Ez a berendezés – ezt még bátran nevezhetjük annak, tekintélyes méretei miatt – ötven darab, egyenként 24 hüvelyk (közel 61 cm) átmérőjű lemezen volt képes tárolni 5 megabájt adatot, súlya pedig meghaladta az 1 tonnát. A tárhely ebben az időszakban még bérbeadásos rendszerrel működött, így óriási „merevlemez-farmok” létesültek, ahol tárolták a bérlők adatait. 5 MB bérlése egy évre 35 000 dollárba került, vagyis 7000 dollár megabájtonként egy évre.
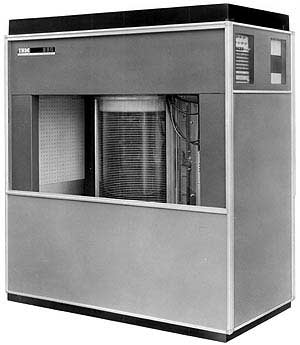
IBM 305
1973-ban mutatták be azt a merevlemezt, amit bizonyára mindenki ismer, csak esetleg nem tudja, hogy honnan: az IBM 3340-et. Ennek a háttértárolónak köszönhetjük a ma oly nagy népszerűségnek örvendő „winchester” nevet, ugyanis a cég ezen a kódnéven fejlesztette a háttértárat (winchesternek csak Magyarországon nevezik a merevlemezt).
1980 júniusában mutatta be a Seagate az első 5,25 hüvelyk lemezátmérőjű (egy hüvelyk 2,54 cm) merevlemezét az ST-506-ot, amely méret terén már valamelyest megközelítette a maiakat – körülbelül akkora volt, mint 2 darab belső CD meghajtó egymáson és közel 2 és fél kg-ot nyomott. Az 5,25 hüvelykes merevlemezek 5 és 10 MB közötti kapacitásra voltak képesek. Bár ez a méret már alkalmas lett volna otthoni számítógépekbe történő beépítésre, az akkori tárhelyhasználathoz mérten irreálisan sok lett volna 5 MB egy otthoni számítógépbe, arról nem is beszélve, hogy akkor még nem voltak mai értelemben vett otthoni számítógépek. Így maradt az ipari felhasználás. Amikor 1983-ban az IBM bemutatta az első személyi számítógépeket (PC), a merevlemezek állandó kellékké léptek elő, szemben az akkorra ezen a téren megszokottá vált hajlékonylemezes és mágnesszalagos megoldásokkal (például az 1982-ben piacra kerülő Commodore 64-ek is ezeket a megoldásokat támogatták elsősorban). A felvásárlópiac ilyen mértékű kibővülése a merevlemezek gyorsabb fejlődését hozta magával.

Seagate ST-506
A 80-as évek közepén kezdték igazán csökkenteni a merevlemezes meghajtók méreteit. 1987-ben megjelentek a 3,5 hüvelykes meghajtók, és szinte azonnal ez lett a szabvány azokon a felhasználási területeken, amelyek nem igényeltek nagyobb tárterültet 500 MB-nál. A méretcsökkenés természetesen a meghajtók magasságára is vonatkozott, előbb 1,9, majd 1 hüvelyk lett a merevlemezek szabványos magassága, ami már megfelel a mai winchesterek méretének.
Az 1990-es évek elején készítettek néhány típust 1,8, sőt, még 1,3 hüvelykes lemezekkel is, amik mindössze 40 MB tárolására voltak képesek, méretük pedig kisebb volt egy gyufásdobozénál. A legkisebb életképes szabványnak a 2,5 hüvelykes lemezméret bizonyult, ám költséghatékonyság terén a 3,5-es volt a legjobb. A gyártás tehát kettéágazott, a hordozható egységek számára tervezett merevlemezek 2,5 hüvelykes lemezzel készültek, míg az asztali verziókba tervezettek maradtak a 3,5-es szabványnál. A technikai fejlődéssel nem csak óriási méret, hanem óriási árcsökkenés is járt. A 90-es évek elejére egy 200 MB kapacitású winchesterért már kevesebbet kértek 200 dollárnál, vagy másképpen fogalmazva kevesebbet, mint egy dollárt megabájtonként. Ez a kezdeti 7000 dollárhoz képest már mindenképpen barátinak mondható.
Ettől kezdve a merevlemezek fejlődése még jobban felgyorsult, amit mi sem mutat jobban, mint az, hogy a legnagyobb kapacitású merevlemez 1997-ben az IBM Giant Magnetoresistive volt, a maga 16,8 GB-jával; 1998-ban az IBM Deskstar 25GP, mely 25 GB-os kapacitással rendelkezett; 1999-re pedig az IBM Ultrastar 72ZX, amely már 73 GB adat tárolására volt képes.
Manapság már nem duplázódik évente a kapacitás, de egyenlőre még 2 évente igen:
2005 az első 500 GB-os HDD (Hithachi)
2006 az első 750 GB-os (Seagate)
2007 az első 1 TB-os (Hithachi)
2008 az első 1.5 TB-os (Seagate)
2009 az első 2 TB-os (Western Digital)
A merevlemezek kapacitása mellett még egy jelentős faktor játszik szerepet a meghajtó életében: az írás-olvasás sebessége. Ezen a gyártók többféle módon tudtak gyorsítani, ilyen a jobb író-olvasó algoritmus fejlesztése és a lemez fordulatszámának emelése. Az író-olvasó algoritmus fejlesztésével az olvasófej intelligensebben tud olvasni a lemezről, vagyis jobb hatékonysággal használja ki pillanatnyi pozícióját, ezzel amennyire csak lehet minimalizálva a fejmozgást. Azonban az igazán lényegi sebességnövekedést sokkal inkább a lemez-fordulatszám emelése jelenti. Mivel a lemez gyorsabban forog, a megfelelő pontja gyorsabban fordul az olvasófej alá, így gyakorlatilag a sebességgel egyenes arányban nőhet az olvasás sebessége is.
Működése
A merevlemez az adatokat mágnesezhető réteggel bevont lemezeken tárolja, melyet a forgó lemez fölött mozgó író/olvasó fej ír, vagy olvas. A lemezek állandóan forognak, forgási sebességüket rpm-ben adják meg (Rotation Per Minute, azaz fordulat per perc; általában 5400 – 7200, SCSI csatolásúaknál 10 000 – 15 000 közötti). A lemezek közé nyúlnak be az író/olvasó fej kajai, általában minden lemezhez 2 darab egy alul egy pedig felül. A fejek tizedmikronnyi távolságra helyezkednek el a mágneses rétegtől ezért ezt a réteget tökéletesen simára polírozzák. A kis távolságot a lemez forgása közben keletkező légpárna teszi lehetővé. A fejek egy központi tengelyen vannak összekapcsolva, ezt egy lineáris motor mozgatja. Ezek alkotják a merevlemez mechanikáját melyet egy zárt házba tesznek. A ház nem teljesen zárt, van rajt egy nyomáskiegyenlítő szelep amelyen csak a gondosan megszűrt levegő tud beáramlani, ha csökkenne a nyomás és kiáramlani ha megnőne (a nyomáskülönbség a hőmérsékletváltozás miatt következik be).

A merevlemez házára szerelik kívülről az elektronikát, mely a motorokat és a fejeket vezérli, adatokat ír és olvas, valamint itt helyezkedik el a cache memória, ahol az átmeneti adatok tartózkodnak.

Írásnál a fej alatt éppen lévő mágneses részecske irányát a fej tekercsében folyó áram határozza meg. Az adattárolás elve szerint a logikai "1" fluxusváltozást okoz, a logikai "0" esetében nincs fluxusváltozás. Olvasásnál a tekercsbe indukált áram minden "1"-nél irányt változtat.
Itt még meg kell említeni az adatrögzítési irányt. Régebben (2005 előtt) a merevlemezek a felületre vízszintes adatrögzítést használták (LR - Longitudinal Recording) ennek a legnagyobb hátránya, hogy helypazarló. Ezért kifejlesztették a merőleges adatrögzítést (PR - Perpendicular recording vagy PMR - Perpendicular Magnetic Recording) ahol a mágneses tér merőlegessé való átrendezésével a gyártóknak lehetősége nyílt az adatsűrűség növelésére.A PMR diszkek tányérjai vastagabbak az új írásirány miatt, s egy lágy réteg is bekerül a rögzítési felület alá.
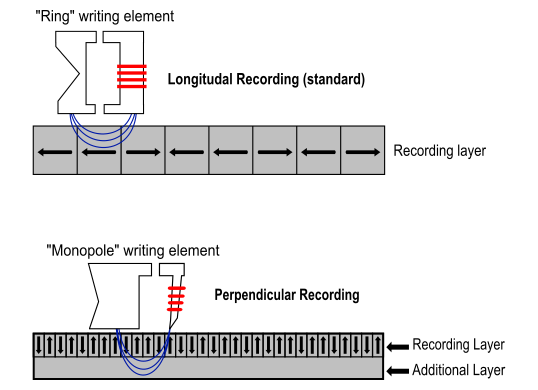
A vízszintes és merőleges adatrögzítés
Adatkódolási eljárások a mágneses jelrögzítéshez
A bináris adatokat kódolt formában tárolják a mágneses felületen, annak érdekében, hogy egy adott felületen minél több adat férjen el. A legismertebb kódolási eljárások a következők
FM (Frequency Modulation = frekvencia moduláció): Ennél a kódolásnál az alacsony és a magas szinteket eltérő frekvenciájú jelek jelzik. Általában a "0" szinthez alacsonyabb frekvenciájú jel tartozik, mint az "1" szinthez. Ebben az esetben minden bithez tartozik egy szinkronjel, ami kis adatsűrűséget eredményez.
MFM (Modified Frequency Modulation = módosított frekvencia moduláció): Az FM kódolás hiányosságait hivatott kiküszöbölni ez az eljárás, amit úgy értek el, hogy a szinkronjelet csak "0" után hagyták meg. Ezt a kódolást alkalmazták az első merevlemezeknél, és a hajlékonylemezeknél.
RLL (Run Length Limited) kódolás: Kifejlesztésénél a cél az volt, hogy a fluxusváltozást további 50%-kal csökkentsék. Ezt az adatok átkódolásával sikerült megoldani. A kódolás elve viszonylag egyszerű, két "1" állapot között meghatározott számú "0" állapotnak kell lennie. Például az RLL 2.7 kód esetében két "1"-es között minimum 2, maximum 7 darab "0" állhat.
A merevlemezek adattárolási struktúrája:
A lemezek felülete koncentrikus körökre, sávokra (track) van osztva. A sávokon belül kisebb egységek, szektorok (sector) vagy blokkok vannak kialakítva. Több lemezfelület esetén a fizikailag egymás alatt elhelyezkedő sávokat cilindernek (cylinder) hívjuk.

Ahhoz, hogy a lemezen létrejöjjenek a sávok és a szektorok, egy speciális műveletet kell végrehajtani, amit formázásnak nevezünk. Az alacsony szintű, vagy fizikai formázás (Low Level Format) lényegében abból áll, hogy felírják a lemezre az azonosítókat, és mindegyik szektorfejbe beírják a sáv számát, a fej sorszámát és a szektor számát (CHS). A szektorok számozása 1-től kezdődik, és a hibás szektorokat eliminálják. Az alacsony szintű formázást a mai merevlemezeknél már a gyárban végrehajtják, így ezt nem kell, sőt általában nem is szabad a felhasználónak elvégezni.
A merevlemezek használatához egy logikai formázást is kell végeznünk, amely kialakítja a lemezen az alkalmazni kívánt fájlrendszert. A logikai lemezkezelés alapegysége a több szektorból álló szektorcsoport, a klaszter (angolul cluster). A fájlok a lemezen klaszterekre vannak osztva, így az operációs rendszer írni és olvasni a merevlemezt csak klaszterenként tudja. Egy klaszterben található szektoroknak a száma a lemez kapacitásától és a használt filerendszertől függ.
Minden merevlemez egy fizikai partícióból áll, ennek mérete a lemez teljes területével egyenlő. A fizikai partíciót fel lehet osztani több logikai partícióra. A logikai partíciókat úgy látjuk, mintha azok külön merevlemezek volnának. A partíciók felhasználásával több operációs rendszer futtatására is lehetőségünk nyílik, ha ezeket külön partíciókban helyezzük el. A merevlemez első szektorában található a mester betöltő bejegyzés (MBR = Master Boot Record), amely a gép indításánál nyújt információt a betöltendő operációs rendszerről. Az MBR része a partíciós tábla, amely a lemezen található logikai partíciókat írja le.
Ahhoz, hogy fájlokat tároljunk egy merevlemezen, a PC-nek fájlrendszerre van szüksége, amely megadja a fájl nevét, helyét. Hasonlít egy katalógusra. Minden partíciónak megvan a saját személyi katalógusa, az állománykiosztási tábla (File Allocation Table, FAT). A legkorábbi fájlrendszer a FAT16 volt, még DOS operációs rendszer alá. Ezt követte a FAT32, ez a Windows 95, Windows 98 fájlrendszere volt, ezt pedig az NTFS (New Technology File System) követte. Ez a Windows NT alapú rendszerek fájlrendszere: a Windows 2000, a Windows XP, a Windows Server 2003 illetve a Windows Vistáé. Unix és Linux operációs rendszerek alatt ettől eltérő fájlrendszereket használnak. A FAT hibátlansága a rendszer működésének elengedhetetlen feltétele. Annak érdekében, hogy véletlenszerű sérülés esetén se legyen probléma, az állomány-elhelyezési táblát két példányban tárolják. A két tábla egymás mögött helyezkedik el, a második az első pontos másolata.
A merevlemez főbb tulajdonságai
Tárolókapacitás*: Ez jellemzi a merevlemezt abból a szempontból, hogy mennyi adat fér rá: kezdetekben csak pár megabájt volt, manapság már a 40 GB – 2 TB között mozog.
Írási és olvasási sebessége: Ezt nagyban befolyásolja a lemez forgási sebessége, amely jellemzően 5400, 7200, 10 000 vagy 15 000 fordulat/perc (rpm). A winchester átviteli sebességének növelésének érdekében beépítenek egy gyorsítótárat (cache-t). Mivel általában szekvenciális írásról és olvasásról van szó, a merevlemez elektronikája a gyorsítótárba gyűjtögeti a kiírandó adatokat, majd ha elegendő összegyűlt akkor egyszerre kiírja a lemezre. Olvasásnál a lemezről többet beolvas, mint amennyire szükség van az adott pillanatban, arra a statisztikai tényre építve, hogy „úgy is kérni fogjuk az utána lévő adatokat” (előreolvasás). Nem kevésbé fontos szerepe még, hogy a csatolófelület felé szakaszosan is, de állandó sebességgel küldje és fogadja az adatokat. A gyorsítótárnak köszönhetően a HDD elérési ideje lényegesen lecsökken. A gyorsítótár lehetőségeinek kihasználása érdekében a nagyobb adatsűrűségű tárolókhoz nagyobb méretű szokott lenni. Régebben 2-4 MB-os, manapság a nagyobb kapacitású HDD-ek mellé 8, 16 vagy 32 MB-os gyorsítótárat szoktak rakni.
Csatolófelület: ezen keresztül történik az adatátvitel, több fajta létezik: ATA (PATA), SATA (SATA I és SATA II), SCSI
* Két módja van a bit-ek és byte-ok számolásának. Ha a nemzetközi decimális rendszerben számolunk, akkor a kilo prefixum az 1000 első hatványát jelenti. Viszont a számítástechnikában, ahol a bináris számrendszer van érvényben, ott 1 Kbyte az 1024 byte-nak felel meg. A különbség 2.4%, ami szorzódik, ahogy egyre magasabb hatványokkal számolunk, és ez adja a különbséget.
A Windows és más operációsrendszerek általában a bináris számrendszerre alapulnak, míg a merevlemezgyártók, és minden, ami a számítástechnikán kívül esik a decimális rendszert használja. Természetesen ez nagyon hasznos a merevlemezgyártóknak, mert így nagyobbak a meghirdetett méretek a valósnál. A másik részről viszont vitázhatnánk, hogy a számítástechnikán kívül sehol sem használjuk a bináris rendszert, így nehéz lenne értelmezni a méreteket.
Az IEEE bemutatta a "Módosítás a IEC Nemzetközi Standard IEC 60027-2"-t 2000-ben, ami leírja, hogy hogyan lehet megkülönböztetni a decimális és a bináris rendszert byte-ok esetén: Kibi (Ki), Mebi (Mi), Gibi (Gi), Tebi (Ti), Pebi (Pi) jelenti a: kilo, mega, giga, tera és peta bináris mértékeket, ami azt jelenti, hogy
egy Kibi byte (1 KiB) az 1,024 bytes,
egy Mebi byte (1 MiB) az 1,024 KiB,
egy Gibi byte (GiB) az 1,024 MiB
stb.
Egyszerűen a bináris adatinformációban van egy i betű a B előtt, ami a byte-ot jelenti.
| Prefixum | Bináris/IEEE Jelölés | Bináris Jelentés | Decimális Prefixum | Decimális Jelölés | Decimális Jelentés | Átszámolás |
| Kibi | Ki | 210 | Kilo | k | 103 | 1 KiB = 1.02 kB 1 kB = 0.977 KiB |
| Mebi | Mi | 220 | Mega | M | 106 | 1 MiB = 1.05 MB 1 MB = 0.954 MiB |
| Gibi | Gi | 230 | Giga | G | 109 | 1 GiB = 1.07 GB 1 GB = 0.932 GiB |
| Tebi | Ti | 240 | Tera | T | 1012 | 1 TiB = 1.10 TB 1 TB = 0.909 TiB |
| Pebi | Pi | 250 | Peta | P | 1015 | 1 PiB = 1.13 PB 1 PB = 0.888 PiB |
SSD(Solid State Disk/Drive)
Az SSD-k alapjait már az 1970-es években lefektették. Egy szilícium-nitrid-alapú EAROM (elektromosan módosítható ROM) volt az SSD elődjének megalkotására tett első próbálkozás, és ma már nehezen hihető, de a találmány azért végezte a süllyesztőben, mert az alig 10 éves élettartam nem volt elfogadható a piac számára. 1978-ban már egy lépéssel előrébb jártak, egy Texas Memory Systems nevű cég bemutatta 16 kilobájtos, RAM-alapú SSD-jét, mely a maiakhoz hasonló elvű és felépítésű volt, de picit drágán kellette magát. Akkoriban egy 1 GB-os SSD körülbelül egymillió dollárba került volna, ha le tudták volna gyártani. Az idő múlásával az SSD magas ára és a mágneses adattárolók térnyerése miatt a háttérbe szorult, ugyanakkor a fejlesztések folyamatosak voltak, de nem kerültek reflektorfénybe egészen a 2000-es évek elejéig. Szakmai körökben volt ismert például az M-Systems, mely a hadsereg, a légiközlekedés és különféle ipari alkalmazások igényeit kielégítő, merevlemezek helyett használható SSD-ket gyártott, illetve kisebb kapacitással szélesebb közönség számára is elérhetők voltak az ún. DOM (disk on module) flashmemóriás tárolók, elsősorban beágyazott rendszerekbe szánva. A viszonylagos csendet a memóriagyártásban is érdekelt Samsung törte meg 2005-ben, amikor bejelentette saját SSD modelljét, igaz, még ez is annyira drága volt, hogy a gyártó mindenekelőtt professzionális felhasználási területeken, ipari és katonai alkalmazások kapcsán számított vásárlókra.

De mi is az az SSD? Tömören egy félvezetőalapú tárolóegység. Azért félvezetőalapú, mert belsejében nem korongok, hanem egyszerűen megfogalmazva memóriachipek találhatók. Kétfajta SSD-t különböztethetünk meg, a DRAM- és a flashmemória-alapúakat. A két típus különböző jellemzőkkel bír. A DRAM-alapúak egyszerű felépítésűek, nagyon gyorsak, hosszú élettartammal bírnak, de folyamatosan áram alatt kell maradniuk, hogy a kondenzátorok ne veszítsék el töltésüket, azaz az adatokat, ezért akkumulátorral és lehetőleg – az áramkimaradásokra gondolva – mentőlemezzel kell őket kiegészíteni. Ráadásul állandó áramfelhasználásuk miatt viszonylag erősen melegszenek és sokat fogyasztanak. Ezekről a DRAM-alapú SSD-kről az átlagfelhasználó ritkán hall, ugyanis ipari és katonai célokra fejlesztik őket.
Manapság a közbeszédben az SSD gyakorlatilag megegyezik a flashmemória-alapú SSD-vel, ilyenekkel találkozhatunk ugyanis a szélesebb körben elérhető elektronikai, számítástechnikai termékekben. A flashmemóriát az alapelvet tekintve az EEPROM egyik válfajának is mondják, bár a betűszóval általában a régebbi technológiát jelölik, melyhez képest a flash sebesség és kapacitás tekintetében is nagyot lépett előre. Leglényegesebb tulajdonsága, hogy áram nélkül is megőrzi az adatokat (non-volatile, azaz nem illékony memória). A flashalapú memóriák lassabbak a DRAM-alapúaknál, amit az adatok blokkos/cellás tárolásával lehet magyarázni.
Az SSD-vel kapcsolatos félelem elsődlegesen az élettartam problémájára vezethető vissza. A DRAM-mal ellentétben a flashalapú tárolók egyes (memória)cellái csak bizonyos számú írást/törlés ciklust képesek elviselni, azonban a közhiedelemmel ellentétben ez nem jelenti azt, hogy a jó SSD egyik pillanatról a másikra tönkremegy. A memórialapkák adott számú írási/törlési műveletre vannak felkészítve, és ha a memórialapkán belül egy cella eléri ezt az értéket, akkor azt a meghajtó kontrollere használaton kívül helyezi (a rajta tárolt információt előtte természetesen átmozgatja). A cellahasználat kiegyensúlyozására, az élettartam meghosszabbítására a gyártók különböző algoritmusokat vetnek be, melyekkel a gyakran írt/törölt cellákat egy időre csak olvasható státuszba helyezik, illetve – kompromisszumokkal – a cellákat igyekeznek egyenlő mértékben terhelni, ezzel jelentősen kiterjeszthető az élettartamuk.
A megbízhatóságot tekintve egyik SSD-típussal sincs probléma, hiszen nem tartalmaznak mozgó alkatrészeket (kivétel képeznek a DRAM-alapú SSD-kben található mentőlemezek, illetve ventilátorok, de a DRAM-alapú SSD-ket eleve nagy szekrényekben tárolják, amiket nem szokás mozgatni). A mozgó alkatrészek hiányában az SSD-k hangtalanok, ami egyes felhasználói rétegek számára fontos szempont lehet a vásárlás során. A kis memóriachipek kevesebbet fogyasztanak, mint a mágneses merevlemezekben található motor, az alacsony fogyasztás velejárója az elhanyagolható hőkibocsátás. Tömegük is kisebb, így a mindennapi felhasználás során rengeteg előnnyel rendelkeznek a manapság használatos merevlemezekkel szemben, ezért már elterjedt a nézet, miszerint a flashmemóriás SSD-k sorsa, hogy idővel, ha nem is teljes mértékben, de leváltsák a HDD-ket.
Összegezve az eddigieket, az SSD-k számos előnnyel kecsegtetnek a hagyományos merevlemezekkel szemben:
- a legfelkapottabb téma a sebesség: az SSD-k a szájhagyomány szerint sokkal gyorsabbak a mágneses adattárolóknál, (egyenlőre csak olvasásban, írásban a gyorsabb HDD-k még versenyben vannak, de hamarosan ebben is jelentős SDD előny várható)
- a rendkívül rövid konstans elérési idő miatt a meghajtó töredezettsége nincs hatással a teljesítményre;
- mozgó alkatrészek hiányában az SSD-k strapabíróak, amíg nem törjük el, addig nincs is velük semmi gond;
- mozgó alkatrészek hiányában zajtalan a működésük;
- kis fogyasztásúak (bár fogyasztás/kapacitás mutatóban egyáltalán nem biztos, hogy kiemelkedőek).
De nem feledkezhetünk meg a hátrányokról sem:
- az áruk a mai napig jelentősen magasabb mint egy HDD-é– erre a problémára csak a gyártók ismerik az ellenszert;
- a magas árral együtt jár a kis kapacitás – erre a problémára az idő lehet a gyógyír, kisebb csíkszélességen nagyobb kapacitású chipek, azaz tárolók gyárthatóak;
- a már fentebb is említett élettartam – erre a problémára talán nincs is végleges ellenszer;
- a blokkos elrendezés hátránya a kisebb véletlenszerű írási sebesség;
- az adatvesztés réme bizonyos helyzetekben, például mágneses mezővel való érintkezés vagy hirtelen áramkimaradás során (DRAM-alapúaknál).
Látható tehát, hogy azért az SSD-k sem teljesen makulátlanok, mint ahogy azt egyes gyártók szokása beállítani.
Egy 1.8 colos HDD és ugyanekkora SSD
Ráadásul ha már flashalapú
SSD, akkor meg kell különböztetnünk az SLC és az MLC alkategóriákat is.
Az
SLC, azaz Single Level Cell és az MLC, azaz Multi Level Cell az SSD-ben
található NAND memóriák (a flashmemóriák SSD-kben is használt válfaja)
két altípusa. Az SLC NAND cellánként egy bit tárolására képes, míg az
MLC ezzel szemben jellemzően kettő vagy néha négy bitet tárol. Bár
utóbbi első hallásra jobbnak tűnik, hiszen kisebb felületen több adat
helyezkedik el (azaz nagyobb az adatsűrűség), ez egyben a hátránya is a
sebességre és élettartamra nézve. Ugyanis az SSD-k cellaszinten
működnek, és ha egy cellában megváltozik vagy sérül az adat, akkor ez
egy MLC SSD számára nem kevesebb, mint két vagy négy bit újraírását
teszi szükségessé, ami természetesen jóval több időt vesz igénybe,
ráadásul jobban fárasztja a cellákat is, összehasonlítva az SLC
mindössze egybites „problémájával”. Logikus tehát azt feltételezni,
hogy az SLC SSD-k a gyorsak, de kisebbek, míg az MLC SSD-k a lassabbak,
de nagyobb tárkapacitásúak. Hozzá kell tenni, hogy az MLC SSD
elméletben kevésbé megbízható, de a fejlettebb hibajavító
algoritmusoknak (ECC) köszönhetően ezzel a problémával nem kell
foglalkozunk (különben ki venné meg?).
Az SSD-k 1.8 valamint 2.5 colos méretben képviseltetik magukat.
RAID(Redundant Array of Independent (Inexpensive) Disks)
RAID rendszerek kifejlesztésének szempontjai:
Nagyobb megbízhatóság
- Korai merevlemezeknek a megbízhatóság volt a leggyengébb pontjuk
- Önálló merevlemezekből olyan elrendezés kialakítása, amely megbízhatóságban és (vagy) teljesítményben meghaladja az összetevő meghajtókat
- A kialakított tömböt az operációs rendszernek egyetlen logikai meghajtóként kell látnia
Nagyobb adatelérési sebesség
- A kialakított tömb biztosítson nagyobb adatelérési sebességet, mint az egyes komponensek külön-külön
Történelme
1978: IBM az első RAID szabadalom: Olyan rendszer, amely segítségével visszaállítható a tárolóban megsérült adat
A Kaliforniai Egyetem számítástudományi tanszéke (University of California, Berkeley) 1987-ben dolgozta ki a RAID rendszert, melynek első célkitűzései csupán a két vagy több merevlemez összekapcsolása oly módon, hogy az a számítógép számára az egy darab logikai meghajtónak látszódjon(RAID 0), majd ezt követően fejlesztések során 1-től 5-ig határoztak meg különböző szinteket (RAID levels), amelyek mind más és más elven valósítják meg az összekapcsolást, olyan szempontokat figyelembevéve mint a nagyobb kapacitás, nagyobb biztonság illetve nagyobb sebesség elérése. Akkoriban még az Inexpensive (olcsó) szót használták a rövidítésben, mára inkább az Independent (független) szerepel a mozaikszóban.
RAID változatok
A RAID nem egy konkrét módszer, több szintje (Level) létezik.
A RAID-ben eredetileg 5 szintet (RAID1-től RAID5-ig) definiáltak. Az egyes szintek általában nem a fejlődési, illetve minőségi sorrendet tükrözik, hanem egyszerűen különböző megoldásokat javasolnak. A kezdeti 5 szinthez később hozzávették a RAID 6-ot. Ezenkívül használjak még a RAID 10, vagy RAID 1+0 elnevezéseket is, amelyek a RAID 1 és a RAID 0 kombinálásával hoznak létre. Hasonlóan a RAID 50 a RAID 5 és a RAID 0 kombinációja.
JBOD
A JBOD (Just a Bunch Of Disks - csak egy köteg lemez) nem valódi RAID-kötet célja, hogy az op. Rendszer több merevlemezt egynek lásson, nem használ redundanciát, csupán összefűzi a lemezeket a lemezek kapacitása összeadódik, ha egy meghajtó meghibásodik, minden adatunk elvész, a RAID vezérlők többsége felajánlja a JBOD lehetőségét.
RAID 0 (csíkozás-striping)
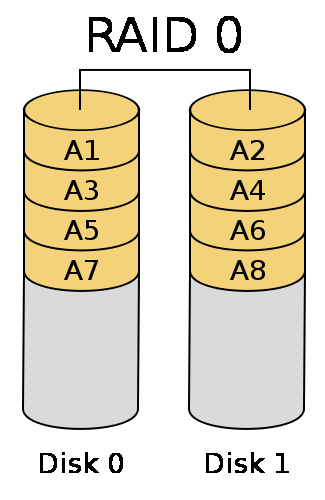
Mind az írási, mind az olvasási műveletek párhuzamosítva történnek. A módszer az összes RAID eljárás közül a legjobb teljesítményt nyújtja, ugyanis a többi módszernél a redundancia kezelése (mint majd látni fogjuk) lassítja a rendszert. A tárkihasználás a redundancia hiánya miatt szintén hatékony. A megoldás lehetővé teszi különböző kapacitású lemezek összekapcsolását is viszont ilyenkor a teljes logikailag elért kapacitás mindössze a kisebb méretű lemez kapacitásának a dupláját fogja jelenteni, tehát egy 120 GB kapacitású és egy 100 GB-os lemez összefűzésekor mindössze egy 200 GB méretű logikai meghajtót fogunk kapni. Természetesen lehetőség van akár 4 diszk összefűzésére is, de redundancia hiányában a lemezek számának növelésével nő az adatvesztés veszélye is, mert itt elég egyetlen eszköz kiesése és már az egész adathalmaz használhatatlanná válhat, amit aztán csak nagyon bonyolult módszerekkel és meglehetősen kis eséllyel lehet csak helyreállítani. A RAID 0 főleg olyan helyeken alkalmazható, ahol nem szempont az adatbiztonság viszont fontos a sebesség.
RAID 1 (tükrözés-mirroring)
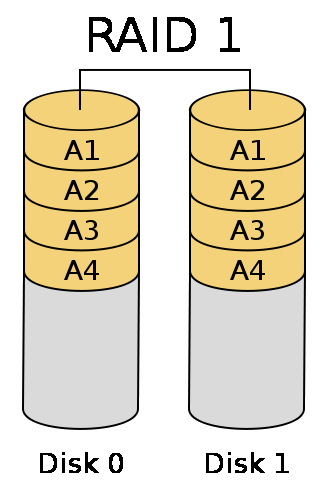
A RAID 1 eljárás alapja az adatok duplikált tárolása, azaz tükrözése (disk mirroring). Az eltárolandó információ mindig párhuzamosan két meghajtón lesz felírva, amely meghajtópárost a számítógép egy szimpla kapacitású logikai meghajtónak lát. Az adatok olvasása párhuzamosan történik a két diszkről, felgyorsítván az olvasási teljesítményt. Az írás normál sebességgel, párhuzamosan történik a két meghajtón. Az eljárás igen jó hibavédelmet biztosít, bármely meghajtó meghibásodása esetén folytatódhat a működés. Ezen nagymértékű hibatolerancia ára a kétszeres tárolókapacitás-felhasználás.
RAID 2
Itt használja a csíkozást, emellett külön meghajtókat használnak paritás információk tárolására Hamming-kód segítségével. A Hamming-kód képes hibadetektálásra és annak javítására. Takarékosabb helykihasználás 66%. A gyakorlatban nem használják ezt a RAID szintet.
RAID 3
Legalább három lemezzel dolgozik (eltérő kapacitással is) abból indul ki, hogy kideríthető, melyik adat vagy meghajtó lett hibás a rendszerben, állományszétosztással dolgozik.
példa: 5 meghajtós tárolás a tárolandó állományt négy blokkra osztjuk, így 4 meghajtó párhuzamosan írható (gyorsaság) a négy blokk mindegyik bájtjának bitjeihez megadjuk a paritásbitet (XOR művelet) a paritásbitekből álló bájtot az ötödik meghajtón tároljuk ha tudjuk, hogy melyik meghajtóról származott a hiba (a meghajtó ECC kódja jelzi), akkor megint csak XOR művelettel visszakapjuk a hibás adatot 80%-os kapacitás kihasználás
RAID 4
A RAID 4 felépítése a RAID 3-mal megegyezik. Az egyetlen különbség, hogy itt nagyméretű sávokat definiálnak, így egy rekord egy meghajtón helyezkedik el, lehetővé téve egyszerre több (különböző meghajtókon elhelyezkedő) rekord párhuzamos írását, illetve olvasását (multi-user mode). Problémát okoz viszont, hogy a paritás meghajtó adott sávját minden egyes íráskor frissíteni kell (plusz egy olvasás és írás), aminek következtében párhuzamos íráskor a paritásmeghajtó a rendszer szűk keresztmetszetévé válik. Ezenkívül valamely meghajtó kiesése esetén a rendszer olvasási teljesítménye is lecsökken, a paritás meghajtó jelentette szűk keresztmetszet miatt.
RAID 5
A RAID 5 a paritás információt nem egy kitüntetett meghajtón, hanem körbeforgó paritás (rotating parity) használatával, egyenletesen az összes meghajtón elosztva tárolja, kiküszöbölvén a paritás meghajtó jelentette szűk keresztmetszetet. Mind az írási, mind az olvasási műveletek párhuzamosan végezhetőek. A sávméret változtatható; kisméretű sávok esetén a RAID 3-hoz hasonló működést, míg nagyméretű sávok alkalmazása esetén a RAID 4-nek megfelelő működést kapunk.
RAID 6
A RAID 6 tekinthető a RAID 5 kibővítésének. Itt nemcsak soronként, hanem oszloponként is kiszámítják a paritást. A módszer segítségével kétszeres meghajtó meghibásodás is kiküszöbölhetővé válik. A paritássávokat itt is az egyes meghajtók között, egyenletesen elosztva tárolják, de ezek természetesen kétszer annyi helyet foglalnak el, mint a RAID 5 esetében.
RAID 0+1 vagy RAID 01
Ez egy amolyan hibrid megoldás, amelyben a RAID 0 által hordozott sebességet a RAID 1-et jellemző biztonságot ötvözhetjük. Hátránya hogy minimálisan 4 eszközre van szükségünk melyekből 1-1-et összefűzve, majd páronként tükrözve építhetjük fel a tömbünket, ezért a teljes kinyerhető kapacitásnak mindössze a felét tudjuk használni, tekintve hogy az első 2 darab diszkből álló összefűzött(RAID 0) tömb a másik 2 darab diszk tükrözését(RAID 1) tárolja.
RAID 1+0 vagy RAID 10

Hasonlít a RAID 01 megoldáshoz annyi különbséggel, hogy itt a a 2-2 diszk között alkalmazzuk a RAID 0 segítségével az összefűzést és ezen belül lévő párok vannak RAID 1 megoldással tükrözve.
Az ismertetett RAID technikák közül a RAID 0-t, RAID 1-et és RAID 5-öt használják elterjedten, illetve az ezek kombinációjaként megvalósított RAID 10-et és RAID 50-et

Merevlemez gyártók oldalai