
FV-600 Frekvenciaváltó
Az villamos motorok közül az aszinkron motorok a legelterjedtebbek az ipari és haztartási alkalmazások között. Ez köszönhető egyszerű és masszív felepítésének, tartósságának és kis karbantartás igényének. Az asszinkron motorokat hazánkban leggyakrabban 50Hz-es váltakozó áramú hálózatról táplálják. Ennek megfelelően a fordulatszámuk megközeliti a szinkron fordulatszámot. Az asszinkron motor furdalatszámát a következő képlettel számithatjuk ki:
Ahol n a motor fordulatszáma (1/min), f a tápláló áram frekvenciája (Hz), p a póluspárok száma, s pedig a slip. A képletet átgondolva kiderül, hogy milyen lehetőségeink adódnak a fordulatszám megváltoztatására. Ezek a következök:
- póluspárok számának megváltoztatása
- A tekercselés kialakításától függően a motor egy bizonyos névleges
fordulatszámon fog müködni. Ez 50Hz-es táplálás és 1 póluspár esetén
kb. 2880 1/min. Több póluspár kialakitásával ez csökkenthető.
2 póluspár esetén kb. 1440 1/min, 3 póluspár esetén kb. 960 1/min
4 póluspár esetén pedig kb. 720 1/min. Speciális tekercseléssel elérhető,
hogy a póluspárok számát üzem közben is változtatni lehesen. Ezt vagy
ugynevezett Dahlander vagy többszörös tekercskialakitással készitik el.
Dahlander tekercselés esetén az 1:2 -hoz arányú fordulatszámváltás
lehetseges. (pl: 2880/1440 1/min vagy 1440/720 1/min) A többszörös
tekercskialakitással más arány is kialakitható. Erre példa a legtöbb
autómata mosogépnek a motorja, amelyek mosáshoz kis fordulatszámon,
centrifugázáshoz pedig nagy fordulatszámon üzemelnek.
Hátránya, hogy csak néhány diszkrét fordulatszám között lehet
változtatni a fordulatszámot.
- slip megváltoztatása
- A slip (magyarul csúszás) a forgórész lemaradása a szinkron
fordulatszámhoz képest. A slip növelésére több lehetöség is
van. Csökkenthetjük a kapocsfeszültséget, vagy tekercselt
forgórészü csúszógyürüs aszinkron motorok esetében a csúszógyürük közé
bekötött ellenállással is növelhetjük. Legnagyobb hátránya, hogy
slip nagyon terhelésfüggő, ezért ennek a fordulatszámváltoztatási
módnak az alkalmazása erősen korlátozott. De létezik például a
körhinták indítását és fordulatszám változtatása ma is ilyen
módon történik.
- tápláló frekvencia megváltoztatása
- Nem véletlen hagytam ezt a legvégére, hiszen a továbbiakban
erröl lesz szó.
Ez a módszer a legalkalmasabb az aszinkron motorok fordulatszámának
megváltoztatására. Nagyon nagy fordulatszámátfogást lehet vele
elérni, (1-200% között) amelynek jelentös tartományában a nyomaték
is közel névleges lehet. A motor terheléssel történő indítását
is nagyban segíti, hiszen az inditónyomaték ebben az esetben
megközelitöleg azonos lehet a billenőnyomatékkal.
A tápáram frekvenviájának megváltoztatására is több lehetőség kinálkozik.
Létezik közvetlen vagy közbülső egyenfeszültségü átalakitó. Ez utóbbiból
a közbülső egyenfeszültséget változtató, vagy a PWM-et alkalmazó típus.
Léteznek fordulatszám visszacsatolásos, vagy úgy nevezett nyílt hurkú
szabályzók. (Ez utóbbi tulajdonképpen vezérlés!) Tehát a paletta elég
széles.
De nézzük a inkább a konkrék kapcsolás adatait:
Az itt ismertetésre kerülő frekvenciaváltó tulajdonságai:
- Bemenő feszültség: 1x230V 50Hz
- Kimenő feszültség: 3x230V 50Hz-nél
- Maximális motorteljesítmény: 600W
- Frekvenciaátfogás: folyamatos 1..75 Hz között
- Nyilthurkú vezérlés (Open loop)
- U/f karakterisztika
- Kimeneti hullámforma: szinuszosan változó kitöltési tényezőjü PWM
- PWM frekvencia: 4,88 kHz
- PWM felbontás: 128
- Gyorsulás szabályozása inditáskor és leállitáskor
- Túláram védelem
- Irányváltoztatás bemenet
- Engedélyezés bemenet
- Bekapcsolást jelző LED
- Hibát jelző LED
A fenti paraméterekből is kitünik, hogy az alábbi kapcsolás egy közbülső egyenfeszültségü körös, nyilt hurkú, U/f karakterisztikájú, PWM kimenő jelü fordulatszámszabályozó. Az inverter gyorsulás szabályzóval van ellátva. Nézzük sorra, hogy mit jelentenek a fenti tulajdonságok:
- Közbülső egyenfeszültségü körös
-
Ez annyit jelent, hogy a kimenőfeszültséget nem közvetlenül a hálózati feszültségből,
hanem egyenfeszültségből állitja elő. Az egyenfeszültséget pedig egyszerűen a hálózati
feszültség egyenirányitásával és szürésével kapom. Az alábbi ábrán az áramkör blokk-vázlatát
mutatja. Itt megfigyelhető, hogy a hálozati 1 fázisú feszültség egy egyenirányitóra,
majd egy pufferkondira kerül. Az igy keletkezett kb. 325V-os feszültség táplálja
az invertert.
- Nyilt hurkú
-
A motor tenyleges fordulatszámát nem érzékeli az áramkör,
igy tulajdonképpen nem is szabályozásról hanem vezérlésről beszélhetünk. Az áramkör
előállítja a fordulatszámot meghatározó potméter állásának megfelelő frekvenciájú
jelet. De nincs tudomása a tényleges fordulatszámról. A tényleges fordulatszám
a terhelés nagyságától függően a slip mértékével változhat. De ez a változás
normál üzemben csak maximum néhány százalék lehet.
- U/f karakterisztikájú
-
A frekvencia változtatása mellett egy dologról nem szabad megfeledkeznünk,
a frekvencia változtatásával arányosan a feszültséget is változtatnunk
kell. Vessunk egy pillantást az aszinkron gépek indukált feszültség
képletére:
Ahol Ui az indukált feszültség (V), fi a fluxus, f a frekvencia (Hz) N pedig a tekercselés menetszáma. A képletből egyártelmüen látszik, ha nem csökkentjük a feszültséget, akkor nő a fluxul. Ami telitené a vasat. A névleges frekvencia alatti tartományban tehát a feszültséget is csökkentenünk kell. Ha pedig a frekvenciát a hálózati fölé növeljük, akkor magasabb feszültségre lenne szükség mint a névleges, hogy a fluxus ebben a tartományban is állandó maradjon. Erre nem volt lehetőség, igy a motorra jutó feszültséget a névleges értéken tartom, ezzel viszont a növekvő frekvenciával csökken a motor fluxusa, és a nyomatéka is.
- PWM kimenő jelű
-
A motorra jutó feszültség hállózati üzemben szinuszos. A rossz hatásfok
miatt az inverterekben ezt valamilyen más hullámformával közelítik. Lehet
Lépcsös négyszög, trapéz, vagy PWM modulált négyszög. Itt ez utóbbit alkalmaztam.
Az alábbi ábrán látható az alkalmazott jelalak. A képre kattintva megtekinthető
nagyobban is. A kép csak példa, a négyszögjel frekvenciájának aránya a szinuszhoz
képest a valóságban nagyobb.
A kék vonal mutatja a motorra jutó feszültséget, fekete pedig a feszültség átlagértékét. Jól megfigyelhető, hogy a motorra jutó 4,88kHz frekvenciájú négyszögjel kitöltési tényezője, és igy az átlagértéke is szinuszosan változik. A szinusz amplitudója is és frekvenciája is a kitöltési tényező folyamatos változtatásával (modulációjával) történik. A következő animált ábrán a motorra jutó három PWM jel időbeli változását figyelhetjük meg.
Az ábrán jól látható, hogy úgynevezett szimetrikus PWM-et alkalmazok, azaz a négyszögjel kitöltési tényezőjét egy periódusra nézve, a periódus idő felére szimetrikusan változtatom.
- Gyorsulás szabályozás
-
Az áramkör gyorsulás szabályozással van ellátva, ami annyit jelent,
hogy a motor bekapcsolásakor, kikapcsolásakor, forgásirányváltáskor,
vagy a fordulatszám megváltoztatásakor nem rögtön a kivánt fordulatszámnak
megfelelő frekvencia kerül a motorra, hanem a frekvenciát folyamatosan
változtatva éri el a beállított értéket. A frekvencia maximális vátozását
(a motor fordulatszámának változását) a P2-es trimmer potméterrel lehet
beállítani.

Nézzük a kapcsolási rajzot:
A hálózati feszültség a biztosíték és zavarszürés után egy egyenirányitóra,
majd egy pufferkondira kerül. Az igy keletkezett kb. 325V-os feszültség
táplálja az invertert.
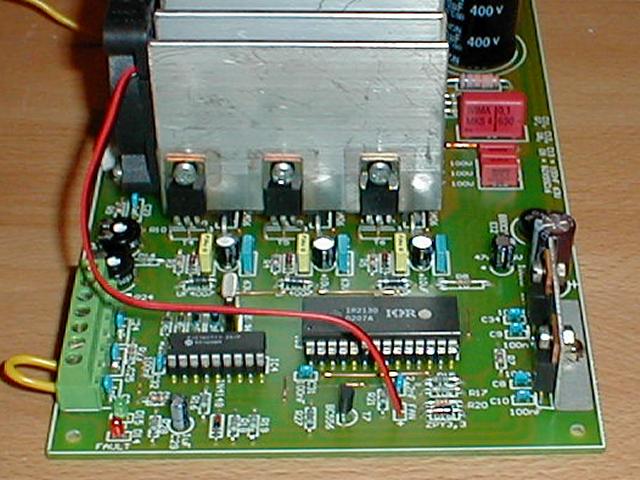
Az inverter 6db IRF840-es FET-ből kialakitott teljes 3 fázisú híd, amely
előállitja a motor számára szükséges hullámformát. A FET-ek meghajtását az
International Rectifier gyártmányú IR2130
típusú IC végzi.
Az inverter vezérlését egy Microchip gyártmányú
PIC16F819-es mikrokontrollerrel oldottam meg. (Korábban PIC16C711-vel.)
A PIC feladata a bemenő paraméterek (kivánt fordulatszám, gyorsulás, irány,
ki vagy bekapcsolt állapot) olvasása, és a paramétereknek megfelelő
vezérlőjelek előállitása.
A kivánt fordulatszámot a P+, P_IN, P_GND közé kötött 5 kOhm-os lineáris
porméterrel lehet szamélyozni. A áramkorlát határáramát a P1-el, a maximális gyorsulást
pedig a P2 trimmerpotméterrel lehet szabályozni. A DIR1 és DIR2 közé kötött zárókontaktussal
lehet a forgásirányt meghatározni. Az EN1 és EN2 közé köttött zárókontaktussal lehet
az áramkört engedélyezni/tiltani, azaz a motor-t ki es bekapcsolni. Az kapcsolás
két LED-et tartalmaz, a ON-jelü D15 (zöld) a bekapcsolt állapotot jelzi, a FAULT jelü
D14 (piros) pedig túláram védelem vagy a túl alacsony feszültség védelem müködését
jelzi.
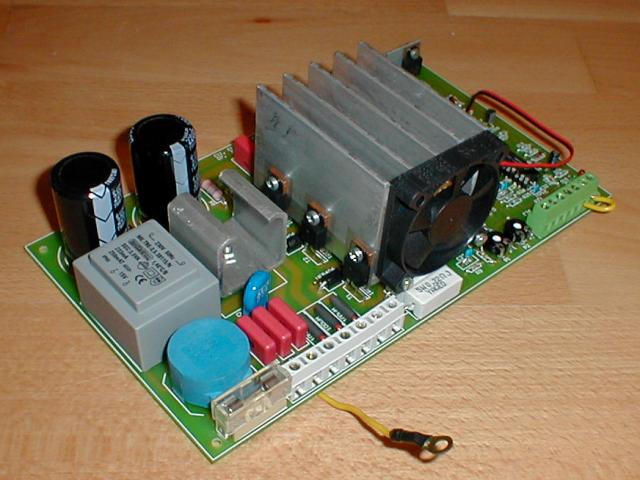
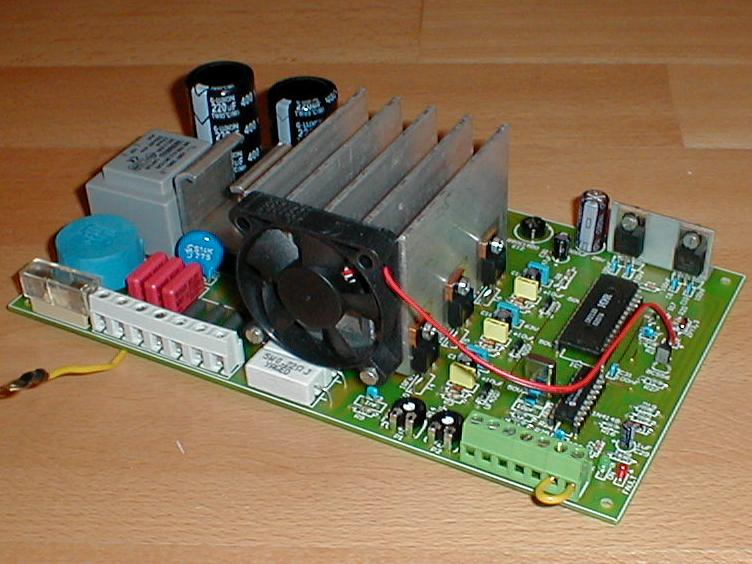
Konstrukció:
Az áramkör egyoldalas nyákon került megvalósitásra. Kompakt kivitelben.
A panel minden szükséges alkatreszt tartalmaz, igy el lett kerulve a felesleges
csatlakozók és vezetékezés. Az panelen lévő nagyáramú vezetősávokhoz tartozó
átkötéseket 0,8 .. 1 mm átmérőjű rézvezetékkel kössük át. A többi átkötést valamilyen
vekonyabb huzallal. Az IC-knek jó minőségű preciziós foglalatot epitsünk be.
A beültetésnél a FET-eket hagyjuk a végére, elöször ültessönk be minden mást,
majd a mellékelt pdf alapján elkészített hütőbordat rögzitsük két csavarral.
A FET-eket csillámmal elszigtelve szereljük fel a bordára. Mivel itt elég nagy a
feszültség a FET-eken, ezért csak jó minőségű szigetelőgyűrüt használjunk.
A szigetelés nagyon fontos, hibás szigetelés esetén a félvezetőink tönkremehetnek.
Ha nem vagyunk biztosak a dolgunkban, akkor inkabb valamilyen TO-247-es tokozású
500V-os FET-et használjuk. (Például: IRFP450)
Teljesítményre ugyan nem kell ekkora, viszont a szereléséhez nem kell szigetelőgyürű,
igy biztosabban szerelhető. A FET-et felfogatásához a jobb hőátadás érdekében
használjuk hovezeto pasztát. (Ne ezüst tartalmut, mert az vezet!)
A greatz hidra szinten szereljünk hütőbordát. A FET-ek hütőbordájára pedig a
megfelelő hűtés érdekében a rajznak szerint rögzitsünk egy 50x50mm-es ventilátort.
Az ilyen méretű ventilátort magában nehéz beszerezni, de a CPU hütőkhőz
hasznaltak/hasznalnak ilyet. Bármeny számítástechnikai boltban beszerezhető.
A Panelt a mellékelt ábra szerinti nyitott dobozba szereljük. A doboz 1,5 mm
vastag vaslemezből készült, feketére van festve. A dobozra feltétlen csatlakoztassuk
a panelról a védő vezetőt. A doboz méretben illeszkedik a villamos iparban
szokásos aluminiumtokozathoz. A dobozt cimkézzük fel a mellékelt bekötési rajzzal.
A hozzá szükséges 192x61mm-es öntapadós matricát nagyobb papirboltokban lehet beszerezni.
(pl.; Ápisz, Ferenciek tere)
A motort bekötéséhez árnyékolt kábelt (pl.; földkábel)kell használnunk,
hogy a kisugárzott zavarójel mértékét csökkentsük.
Az áramkörhöz használhatjuk kiegészítésképpen a szinten az oldalamon található
Fordulatszám és frekvencia kijelzo-t
a motor, vagy az attételezés utánni fordulatszám mérésére.
A doksik:
- A áramkör kapcsolási és nyák rajza és alkatrészlistája pdf formátumban (Rev. 1.2a)
- A hűtőborda rajza pdf formátumban (módosított)
- Doboz rajza pdf formátumban
- A bekötés felcimkézése pdf formatumban 192x61mm-es öntapadós matricara nyomtatni
- A PIC16F819 programja + NYAK
Ajánlott irodalom:
- Frekvenciaváltókról alapfokon - 1. rész
- Frekvenciaváltókról alapfokon - 2. rész
- Frekvenciaváltókról alapfokon - 3. rész
- Frekvenciaváltókról alapfokon - 4. rész
- IR2130 datasheet
- IR2130 appliacation note
- RT95/8 Elektronikus vezérlés háromfázisú indukciós motorokhoz
- Modern frekvenciaváltós aszinkron motoros hajtások (MEK)
A IR2130 IC beszerzése:
- Lomex Kft. 2100Ft
- HQ Video Kft. 2400Ft
- RET Kft. 2800Ft
- Orszaczky Kft. 3200Ft
Képek:
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
Ird meg kérdésed vagy véleményed: