One of my friend bought a similar 5 pack of 150mAh LiPo batteries + 5 output USB charger from ebay for his Furibee F36:

He told me that the batteries bought with it start loosing their capacity after a short period.
He also noticed that the charger charged pretty quickly the at the first cycles too.
After tearing apart the charger we figured out that reason for both thing (the degradation and the fast charge):
There are 5 individual chargers on the PCB built around the LTC4045 IC.
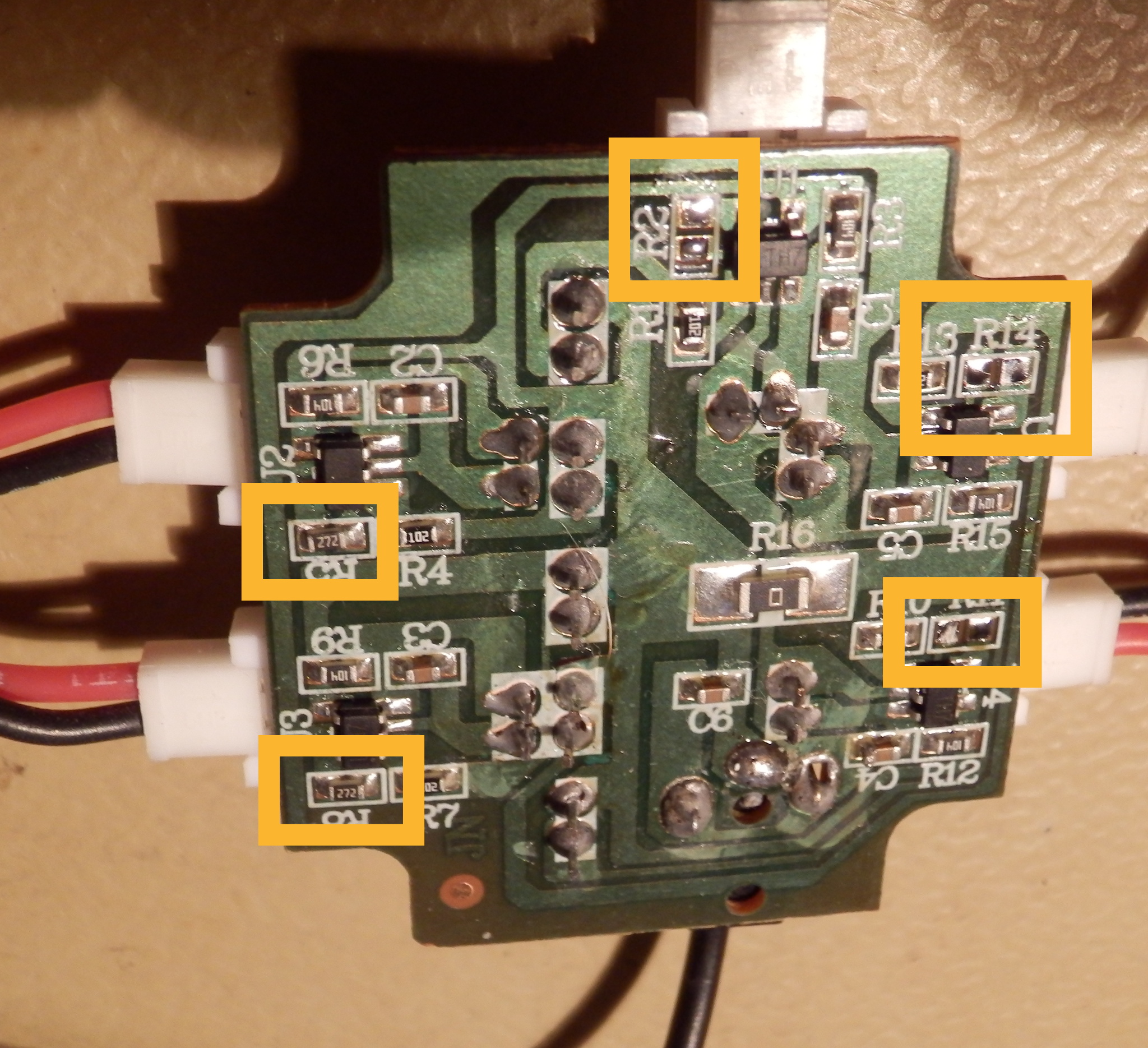
The charging current is controlled by a resistor which was 2700 Ohm in the board.
If we look into the datasheet we find the equation of the charging current:
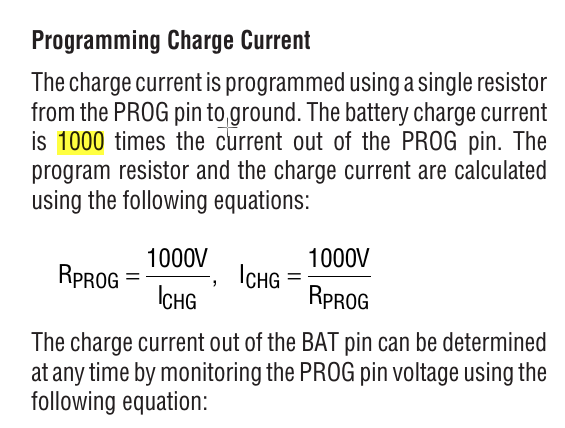
As you can calculate the charging current is set to 1000V/2700Ohm == 370 mA. In the case of a 150mAh battery the charging current is ~2.5C which is pretty high. Usually it is recommended to charge with maximum 1C these batteries.
1C gives us 1000/0.150 == 6666Ohm for prog resistor. It is not so common resistor, so a 6800Ohm (charge current == 147mAh)should fit well.
We wish your batteries long life!
[ hozzászólás ] ( 18 megtekintés ) [ 0 trackbackek ] permalink ;)
He told me that the batteries bought with it start loosing their capacity after a short period.
He also noticed that the charger charged pretty quickly the at the first cycles too.
After tearing apart the charger we figured out that reason for both thing (the degradation and the fast charge):
There are 5 individual chargers on the PCB built around the LTC4045 IC.
;)
The charging current is controlled by a resistor which was 2700 Ohm in the board.
If we look into the datasheet we find the equation of the charging current:
As you can calculate the charging current is set to 1000V/2700Ohm == 370 mA. In the case of a 150mAh battery the charging current is ~2.5C which is pretty high. Usually it is recommended to charge with maximum 1C these batteries.
1C gives us 1000/0.150 == 6666Ohm for prog resistor. It is not so common resistor, so a 6800Ohm (charge current == 147mAh)should fit well.
We wish your batteries long life!

 ( 3 / 6097 )
( 3 / 6097 )

;)
;)
;)
;)
;)







