![]()
Petrik Ottó
Légpárnás jármű modellje
Modelltechnikai kérdések
Működő modelleknél nem elégedhetünk meg csupán a hosszúságok arányos leképzésével, hanem figyelembe kell vennünk azt is, miként alakulnak egyes további fizikai mennyiségek viszonyai.

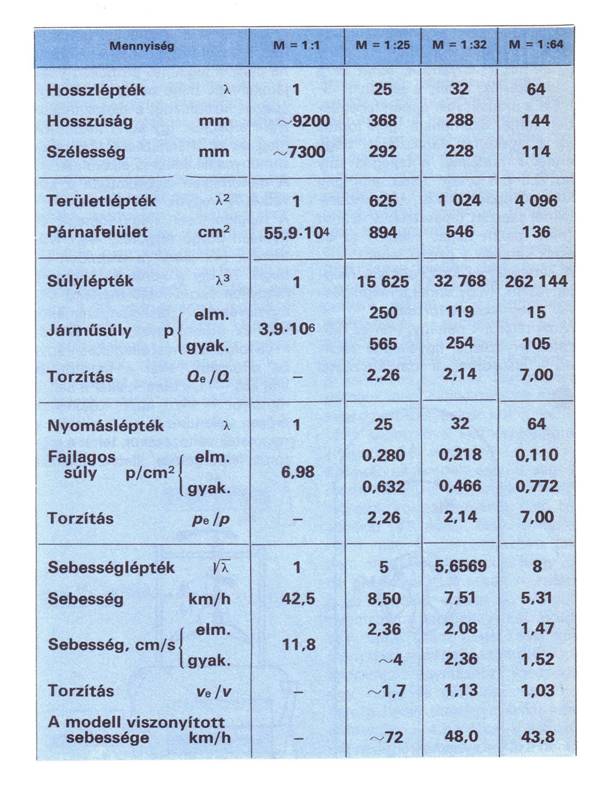
3. táblázat.
Egyes fizikai mennyiségek aránya a hosszlépték függvényében
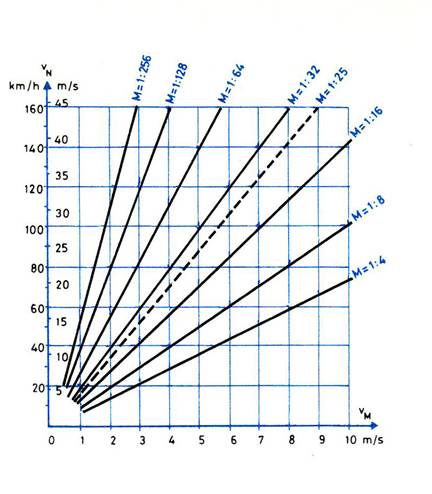
40. ábra.
Az összefüggéseket a 3. táblázatban foglaltuk össze. Az arányos, működő modelleknél követelmény a megfelelő sebesség, ezért az előzetes tájékozódás érdekében közöljük a 40. ábra grafikonját, amelyből a modelltől megkívánt sebességet a főkivitel sebessége és a méretarány függvényében közvetlenül leolvashatjuk. Az összefüggő vonalak a természetes méretarány-sorozatra vonatkoznak; mellette szaggatva behúztuk az M = 1 :25 nek megfelelő vonalat is, tekintettel arra, hogy ezzel a méretaránnyal a későbbiekben még foglalkozunk. (A körpályás modellek sebességének közvetlen átszámításra szolgáló grafikont a 47. ábrán közöljük.) A kísérletek során az igen egyszerű
elépítésű SR.N1 jármű modelljét több méretben is megépítettük, és kísérleteket folytattunk velük. Ezek összefoglalását találjuk a 4. táblázatban, amelynek adatai alapján igen hasznos összehasonlítást tehetünk a legfontosabb fizikai mennyiségek alakulását illetően. Az első oszlopban szerepelnek a kérdéses mennyiségek és dimenzióik, illetve a léptékek aránya a hosszlépték függvényében (a kis „p” pondban mért súlyt jelent). Az „elm." megjelölés a modelltörvény alapján számított, elméletileg szükséges értékekre vonatkozik, a „gyak." pedig a modellen mért gyakorlati (effektív, tényleges) mennyiségekre. E kettő viszonyát neveztük „torzítás"-nak, ahol a számlálóban a modell értékei szerepelnek, amelyek mindig nagyobbak a szükségesnél, és így közvetlenül jól érzékelhető számértéket kapunk (azaz modellünk hányszor „rosszabb" az ideálisnál).
4. táblázat.
Az SR.N1 modellek összehasonlító adatai
A szóban forgó modelleknél ügyeltünk a méretarányos leképzésre, és ezért a geometriai méreteknél torzítás nincs. A járműsúly már meglehetősen nagy torzítást mutat, ami a modell léptékének növekedésével együtt növekszik. Megjegyzendő, hogy a viszonylag nagy modellsúlyok a villamos motorok következtében jelentkeznek; az M = 1 :25 méretarányú modell különösen kedvezőtlen súlya pedig azzal magyarázható, hogy ennél - tekintettel a, nagy méretre - nehezebb motort használtunk fel. (Grundig típusú, GK 26/400 R jelű magnómotort, eltávolítva róla a centrifugális szabályozót).
A fajlagos súly a jármű súlyának és a tényleges légpárna- (emelő-) felületnek a hányadosa, tehát az a nyomásérték, amely a járművet, illetve a modellt már éppen lebegésben tartja. Számunkra igen fontos az a gyakorlati tapasztalat, hogy ennél a modellnél a fajlagos súly kb. 0,5-0,8 p/cm2 lehet, ami igen könnyű építést kíván. Más modelleknél szerzett tapasztalatok szerint (nem reaktív hajtás esetén) ez az érték kereken 1 p/cm2 lehet.
A sebességgel kapcsolatban megjegyezzük, hogy ennél a megoldásnál a legkisebb a torzítás.
Most rátérünk néhány, már az előzetes tervezésnél figyelembe veendő - elsősorban a kormányzással kapcsolatos - modellmechanikai kérdésre.
A modellnél - a főkivitel gépezeti felépítésétől függetlenül - célszerű, ha mind a légsűrítő propellert vagy járókereket, mind pedig a toló légcsavart közvetlenül a motor tengelyére erősítjük. Így súlyt takarítunk meg, és az áttételezéssel járó teljesítménycsökkenést is elkerüljük.
A motorokkal kapcsolatban a következőt vegyük figyelembe.
A meglehetősen nagy tömegű és gyorsan pörgő forgórész Mh nyomatéka (41, ábra) a szabadon lebegő, és így a könnyen elforduló modellen észrevehető mértékű Mr úgynevezett reakciónyomatékot kelt. Ez utóbbi igyekszik a járművet a forgásiránnyal ellentétes irányba elforgatni, akár a légsűrítőről van szó - 41 /a ábra -, akár a hajtómotorról - 41 /b ábra. Különösen erősen jelentkezik ez a hatás a nyomaték változásakor, tehát a motorok felpörgetése, illetve leállítása alkalmával (ez utóbbi esetben természetesen ellentétes irányban).
Ezt a körülményt figyelembe kell vennünk, és a fellépő Mr nyomatékot valamilyen megoldással célszerűen ki kell egyenlítenünk.
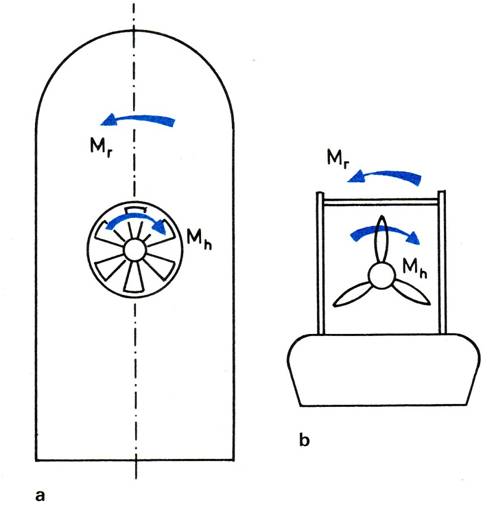
41. ábra.
Ugyanekkor ezt a jelenséget a modell kormányzásánál hasznosíthatjuk, erre egy érdekes példát a 74. ábrán mutatunk majd be.
A kormányzással kapcsolatban felhívjuk a figyelmet arra, hogy a modellek arányosan kicsinyített kormányfelületei a gyakorlatban nem felelnek meg a követelményeknek. Ennek egyszerű oka a modelltörvényben keresendő: például egy M = 1:25 méretarányú modellnél a felületek λ2 = 625-ször kisebbek a főkivitelénél, a sebesség pedig √λ = 5-ször. Ugyanekkor a kormányzáshoz szükséges közegellenállásnak csak λ= 25-ször szabadna kisebbnek lennie - ugyanabban a közegben, a levegőben -, ez pedig gyakorlatilag megoldhatatlan. Tehát valamilyen „szükségmegoldást" kell keresnünk.
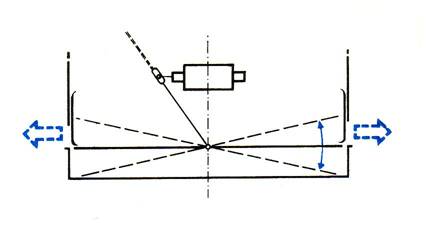
Egyik ilyen lehetőség, hogy nem csupán a kormányfelületet, hanem vele együtt a hajtómotort is elforgatjuk. Erre a megoldásra (egy motor esetén) példát a 42. ábrán láthatunk. Az M hajtómotort súlypontjában függőleges tengelyen csapágyazzuk. Ezen a tengelyen egy ívszegmenst is elhelyezünk, amelynek mérete a lehetséges elfordulásnak feleljen meg. A szegmenshez az Ms segédmotor - tengelyére húzott gumihengerecske segítségével - súrlódással csatlakozik, amellyel a kormányt a kívánt helyzetbe tudjuk állítani. A túlfutást a szegmens szélének felhajtásával gátoljuk meg. Természetesen az Ms segédmotort ilyenkor külön irányváltó kapcsolóval kell vezérelnünk. (Példa: a 66.
ábrán.)
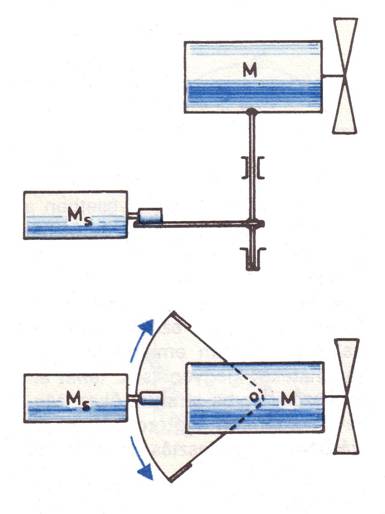
42. ábra.
Kétmotoros modell esetén segédmotor nélkül is elérhetjük a hajtómotorok kormányzásához való beállítását (43. ábra). Ekkor a motorokat nem a súlypontjukban, hanem oldalt csapágyazzuk, hogy így az e excentricitás révén - különböző húzóerő esetén - elforgató nyomatékot kapjunk. A két motort egy karral (mint a gépkocsi kormányszerkezetének összekötőrúdja) kapcsoljuk egymáshoz, mégpedig úgy, hogy ne párhuzamosan, hanem a belső csapágyazásnál kissé széttartóan - 43/a ábra -, a külsőnél pedig összetartva - 43/b ábra - forduljanak el. A szélső helyzetet a kétféle megoldásnál a 43/c, illetve d ábrán látjuk. Mindkét esetben a bal oldali motor teljes húzóerőt fejt ki, a másik csak kevesebbet, vagy teljesen le is állítjuk.
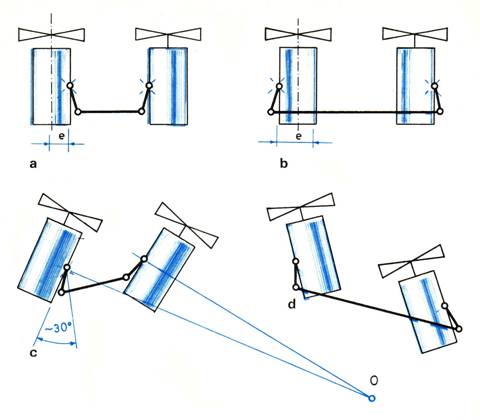
43. ábra.
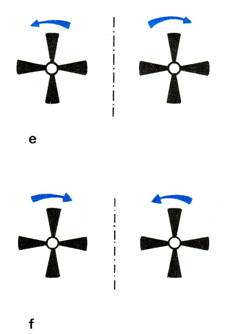
Két motor esetén legyünk figyelemmel arra, hogy ezek a 41. ábrával kapcsolatban említett reakciónyomatékot kiegyenlítsék, tehát ellenkező irányba járatjuk őket. Mereven beépített motoroknál a forgásirány megválasztása kevésbé jelentős, az excentrikusan csapágyazott elforduló motoroknál azonban a 43/e, illetve f ábra szerint kell eljárnunk. Ennek magyarázatát a 44. ábrán látjuk, ahol feltüntettük a két csapágyazási változatot. Megjegyezzük, hogy esztétikai szempontból a belső csapágyazás az előnyösebb (kevésbé feltűnő), azonban a kormányzást tekintve ez a megoldás a hátrányosabb. Előre bocsátjuk, hogy a hatásosabb kormányzás érdekében jó, ha a modell az F-fel jelölt pontban enyhén súrlódik a talajhoz. Ez a pont az ív külső oldalán legyen, nagyjából olyan helyen, hogy az S súlyponttal összekötő egyenes megközelítően párhuzamos legyen a motorok átlagos elfordulásának irányával.
44. ábra.
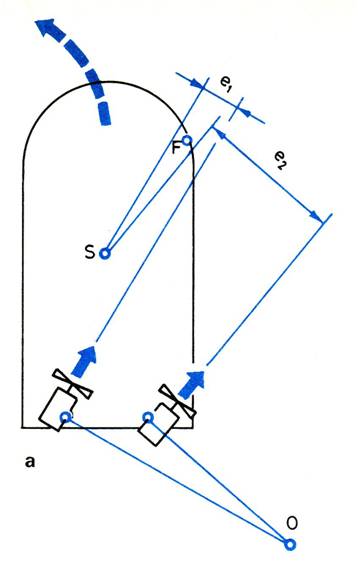
Ha a bal motort a 44/a ábra szerint teljes erővel járatjuk, az elfordulás után a motor az S súlypontra az e1 karral fejt ki nyomatékot. Itt nagy erő kis karral működik, tehát a másik motort lassabban járatva a fordulást jobban elő kell segítenünk: itt kisebb erővel nagyobb, e2 karon kapunk nyomatékot. A légpárnás járműnek elvben az S súlypont körül kell elfordulnia, ha azonban a szabad mozgást az F pontban a gyenge érintkezés kissé gátolja, a forgás utóbbi körül következik be. (A nyomatékok karjai ekkor sem különböznek lényegesen a súlypontra vonatkozó karoktól.)
Említettük, hogy az F pont a külső oldalon helyezkedik el. Itt az érintkezést két tényező segíti elő. Egyszer a menet közben fellépő centrifugális erő a modellt a külső oldalra billenti; másodszor ezt a billenést még mesterségesen is fokozhatjuk. A 43/e-f ábráknál a különböző forgásirányokról mondottaknak ebben találjuk a magyarázatát. Ha ugyanis a 44/a ábrán vázolt esetben a bal motor nagyobb nyomatékkal, kifelé pörög, ez ellenkező irányú Mr reakciónyomatékot ébreszt, amely a járművet szintén jobbra billenti. Hasonló a helyzet a 44/b ábrán, ahol a nagyobb nyomatékkal járó motor . hosszabb e1 karja lényegesen előnyösebb. Itt a befelé forgó, bal oldali motor a járművet balra billenti, és így segíti elő az érintkezést az F pontban.
Az elforduló motoroknak a modellekbe való beépítése, valamint vezérlésük is meglehetősen bonyolult (az utóbbira a következő fejezetben térünk ki). Így célszerű, ha a kormányzás hatásosságának növelésére más megoldást választunk; ilyet egyébként egyes esetekben a főkivitelnél is alkalmaznak. Lényege, hogy a jármű oldalán - általában hátul és a súlyponttól lehetőleg távol, hogy a hatást ezzel növeljék - szabályozható légkifúvó nyílásokat képeznek ki, s az ezen kiáramló levegő reaktív tolóereje segíti elő a kormányzást. Ilyen „kormányzónyílások" például az SR.N6 (29. ábra), illetve a VZ-1 (31. ábra) típusjelű járműveken jól láthatók.
45. ábra.
Egy, a modelleken alkalmazható megoldást a 45. ábrán mutatunk be sematikusan. A modell tengelyében csapágyazott keresztkar két végére, belülről, lágyan az oldalfalhoz simuló gumilemezeket erősítünk. A keresztkart célszerűen lágy modellezőgumival tartjuk középállásban, és a szükséges állítást háromállású -, illetve két irányban működő - elektromágnessel végezzük (erre példákat látunk a 63. és 64. ábrán).
Ennek a pontnak befejezéseként említjük meg a körpályás modelleket. A pálya méretét két tényező befolyásolja: a rendelkezésre álló terület, és a méretarányhoz való igazodás úgy, hogy kerek méretű pályahosszat kapjunk. Szobában célszerű 2 m körüli pályasugarat választani. A követelményeket figyelembe véve a pálya sugara - a forgási középpontból a modell súlypontjáig - R = 1990 mm (46. ábra). Ekkor a pálya (egy kör) hossza : LM = 2πR = 2 * 3,1416 * 1,990 = 12,50 m. Ennek megfelelően –a természetes méretarány sorozat- a főkivitelre – λ-val szorozva –a következő pályahosszakat kapjuk:
|
λ = |
4 |
8 |
16 |
32 |
64 |
128 |
256 |
|
LM = |
50 |
100 |
200 |
400 |
800 |
1600 |
3200 m |
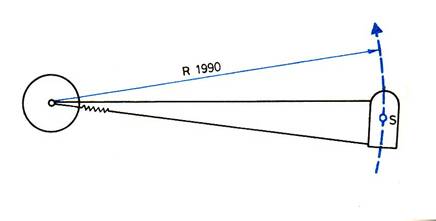
46. ábra.
(Megjegyezzük, hogy M = 1:25 méretarány esetén például 8 kör kerek 2500 m-t ad ki.)
A körpályás modellek sebességét több kör lefutása után mérik. Ehhez nyújt segítséget a 47. ábrán található grafikon, amelyből L = 125 m, azaz tíz kör pályahosszhoz a s-ban mért idő alapján (a méretarány függvényében) azonnal kiolvashatjuk a főkivitelnek megfelelő sebességet.
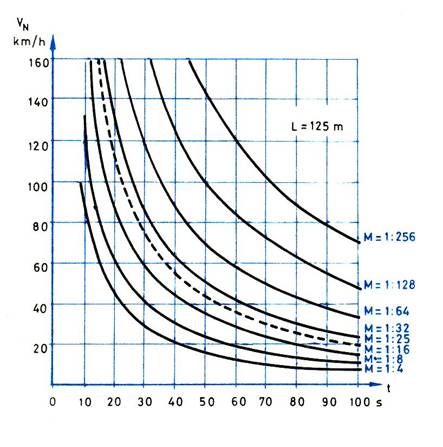
47. ábra.
Még néhány szó a körpályás modellek vezérléséről. Minthogy ezeknél kormányzásra nincsen szükség, hajtásuk kéteres villanyvezetékkel megoldható; ehhez az ún. kikötőhuzalok célszerűen felhasználhatók. A középpontot a 48. ábra szerint alakítjuk ki. Egy kb. 10-12 cm átmérőjű vastagabb vaslemez (vagy például konzervdobozba kiöntött ólomtömb) közepébe lyukat fúrunk, és beleerősítünk egy golyóstoll betétből vágott csődarabot a 48/a ábra szerint. Utóbbiba szigetelt, keményebb vezetéket húzunk úgy, hogy felül néhány mm-t kiálljon; ott a szigetelést letisztítjuk, és megfelelő érintkezést képezünk ki. A két vezetőhuzal egy-egy pólust vezet a modellhez; átlagos magasságuk (h) a modell súlypontjának magasságával megegyező legyen. A hátsó huzalt kissé rugózóra is sodorhatjuk, de csak annyira, hogy a fellépő centrifugális erő az 1990 mm-es sugarat ne növelje meg (l. 46. ábra).
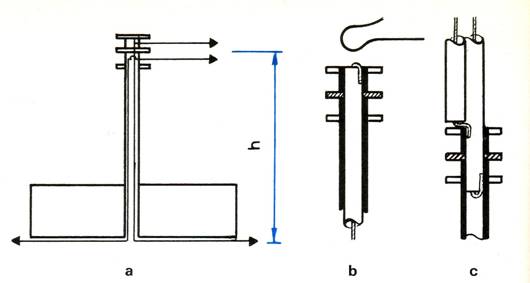
48. ábra.
Az alsó hozzávezetés részletét a 48/b ábrán látjuk. Az említett szigetelt huzal teljesen kitölti a csövet, amelyre a felső végén szigetelt alátétet húzunk (az ábrán vonalkázva), majd még egy rövidebb csődarabot a másik pólus részére; ehhez csatlakozik a felső vezeték. A vezetőhuzalok lecsúszását még két fém alátéttel gátoljuk meg; kikapcsolódásukat pedig úgy, hogy az oszlophoz a felülnézetben ábrázolt formájú rugózó füllel csatlakoztatjuk őket. Felső hozzávezetést a 48/c ábra szerint kéteres vezetékkel, hasonlóan az előzőkhöz készíthetünk.
♣ Archiválta SRY 2008 október 08. ♣ CANON
LiDE system ♣ Microsoft Word ♣ SRY MODELL 2008