Eldöntöttem, hogy az utolsó két hétben ledokumentálom mit is csinálok, hogy utólag könnyen lehessen mutogatni hogy hol lett eltolva.
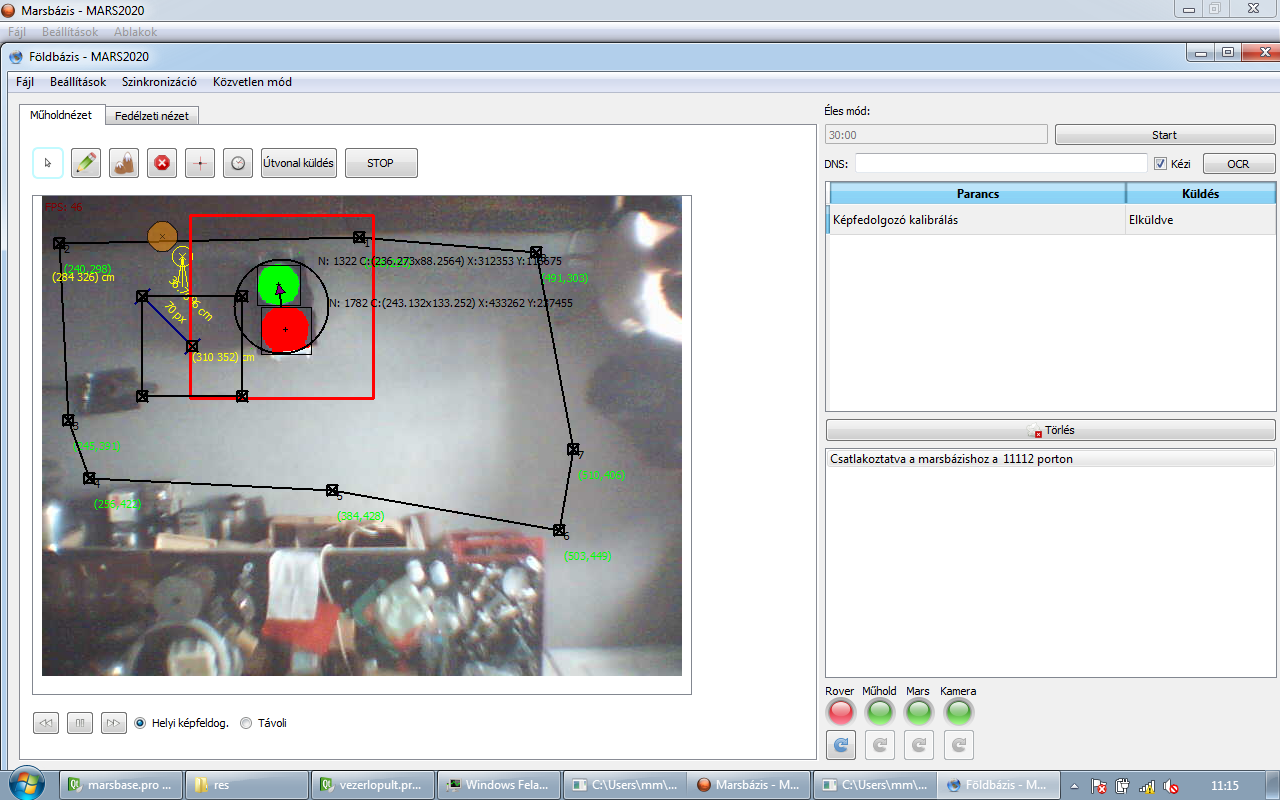
Ma elektró után nekiálltam tesztelni az előkészítőben a hétvégén elkészült megállásérzékelő modult a képfeldolgozóban. A dolog lényege mindössze annyi, hogy ha egyenes haladás során n képkockáig nem észlel a magengedett küszöbérték feletti mozgást, akkor az első ilyen képkocka megszerzésének időpontját tekinti a mozgás befejeződésének. Ez több okból is hasznos: egyrészt kezelni tudjuk az elakadást, másrészt a hamarabb tudjuk kalkulálni a következő műveletet.
A baj csak annyi, hogy a parancs kiküldése és a kép késése miatt kapásból megálltnak tekinti a gépet. Először próbáltam "élvezérlést tenni bele" értsd, ha elindult csak azután számolja a nem mozdult képeket. Ez sajnos nem jött be, így aztán maradt az a megoldás, hogy csak 1 sec után kezdjen el erre figyelni.
Természetesen a napi szívás ma sem maradhatott el. A képfeldolgozó időnként elvesztette a rovert periódikusan. Elveszettenk akkor tekintjük, ha 500 msig nem sikerül megtalálni a képen a rovert. Értelemszerűen ez akkor is bekövetkezik ha 500 msig nem érkezik kép. Jó mondom rossz napja van az NSLU2nek újraindítom. A hibát továbbra is produkálta.
Végül egy reboot után ráunva a dologra toltam egy:
Hm hm. A használt 5 méteres kábelt anno kölcsönadtam egy spanomnak, aki azzal hozta vissza, hogy nem biztos benne hogy jó. Felmásztam hát és megmozgattam kicsit a kábelt odafent érdekes módon kiesett a linkből. 70 centi levág visszakrimpel. Élet megy tovább.
Na mára ennyi. Reszelek egy kicsit még a képfeldolgozón, aztán várom a holnapi tesztet amin reményeim szerint a teljes missziót le tudjuk tesztelni.
Most pedig Symbain SDK-t telepítek. Linuxra of korsz.
http://labs.trolltech.com/blogs/2010/04 ... ing-linux/
Jahh és megy ringyózon is a marsbázis:
A megjelenítés (zoom pan ilyesmik) fürgébbnek tűnnnek, mivel itt be lehet kapcsolni az OpenGL accelerationt.
[ 1 hozzászólás ] ( 7 megtekintés ) [ 0 trackbackek ] permalink Ma elektró után nekiálltam tesztelni az előkészítőben a hétvégén elkészült megállásérzékelő modult a képfeldolgozóban. A dolog lényege mindössze annyi, hogy ha egyenes haladás során n képkockáig nem észlel a magengedett küszöbérték feletti mozgást, akkor az első ilyen képkocka megszerzésének időpontját tekinti a mozgás befejeződésének. Ez több okból is hasznos: egyrészt kezelni tudjuk az elakadást, másrészt a hamarabb tudjuk kalkulálni a következő műveletet.
A baj csak annyi, hogy a parancs kiküldése és a kép késése miatt kapásból megálltnak tekinti a gépet. Először próbáltam "élvezérlést tenni bele" értsd, ha elindult csak azután számolja a nem mozdult képeket. Ez sajnos nem jött be, így aztán maradt az a megoldás, hogy csak 1 sec után kezdjen el erre figyelni.
Természetesen a napi szívás ma sem maradhatott el. A képfeldolgozó időnként elvesztette a rovert periódikusan. Elveszettenk akkor tekintjük, ha 500 msig nem sikerül megtalálni a képen a rovert. Értelemszerűen ez akkor is bekövetkezik ha 500 msig nem érkezik kép. Jó mondom rossz napja van az NSLU2nek újraindítom. A hibát továbbra is produkálta.
Végül egy reboot után ráunva a dologra toltam egy:
mm@lapos:~$ ifconfig eth0
eth0 Link encap:Ethernet HWaddr
inet addr:192.168.1.148 Bcast:192.168.1.255 Mask:255.255.255.0
inet6 addr: fe80::21b:fcff:fedd:2c80/64 Scope:Link
UP BROADCAST RUNNING MULTICAST MTU:1500 Metric:1
RX packets:48970 errors:14568 dropped:0 overruns:0 frame:0
TX packets:68700 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:1000
RX bytes:3214264 (3.2 MB) TX bytes:1516204 (1.5 MB)
Interrupt:20 Base address:0xb800
Hm hm. A használt 5 méteres kábelt anno kölcsönadtam egy spanomnak, aki azzal hozta vissza, hogy nem biztos benne hogy jó. Felmásztam hát és megmozgattam kicsit a kábelt odafent érdekes módon kiesett a linkből. 70 centi levág visszakrimpel. Élet megy tovább.
Na mára ennyi. Reszelek egy kicsit még a képfeldolgozón, aztán várom a holnapi tesztet amin reményeim szerint a teljes missziót le tudjuk tesztelni.
Most pedig Symbain SDK-t telepítek. Linuxra of korsz.
http://labs.trolltech.com/blogs/2010/04 ... ing-linux/
Jahh és megy ringyózon is a marsbázis:
;)
A megjelenítés (zoom pan ilyesmik) fürgébbnek tűnnnek, mivel itt be lehet kapcsolni az OpenGL accelerationt.


 ( 3 / 2791 )
( 3 / 2791 )







